本系列意在长期连载分享,内容上可能也会有所增删改减;
因此如果转载,请务必保留源地址,非常感谢!
知乎专栏:当我们在谈论数据挖掘
引言
在"当我们在谈论 DRL:从Q-learning到DQN"中,我们简单回顾了 RL 的基础知识,并介绍了结合 RL 与 DL 的 DQN。其中介绍的算法基本都是先计算出 Value Function, 然后依靠某种规则得到 Policy。在本篇中,我们聚焦于那些直接对 Policy 进行参数化并优化的方法,即 Policy Based 算法。其中有些算法会需要同时对 Policy 和 Value Function 进行参数化并计算,即 Actor Critic 算法。
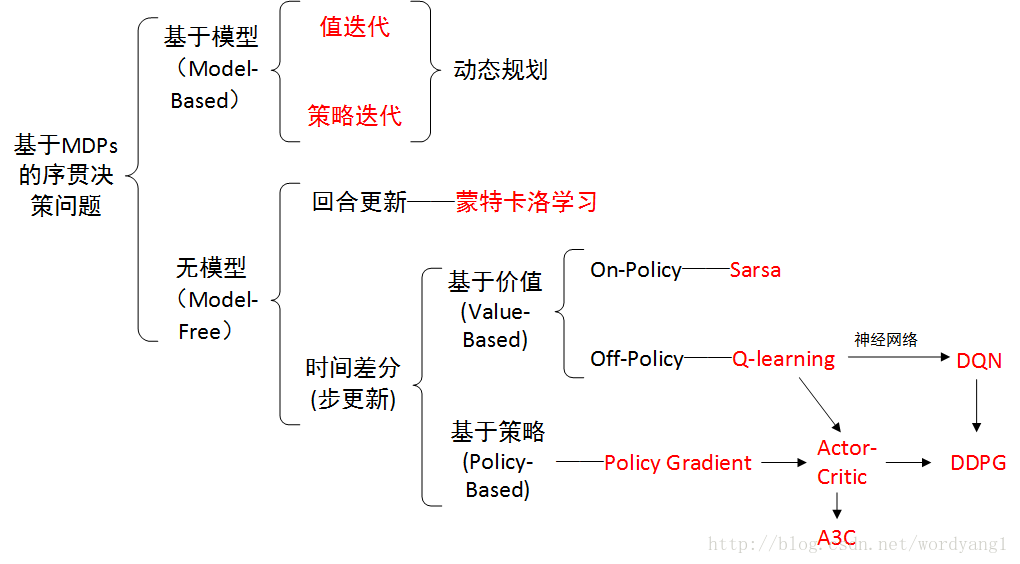
需要解释的是,由于我希望对 Policy Based 算法有个较系统的梳理,所以本文涉及的知识点会比较多;但限于篇幅,不会对每个细节进行详细的介绍。这里先给出一张 RL 算法分类/演进示意图(图出自强化学习(Reinforcement Learning)的方法分类)。需要深入理解相关知识的同学可以按图索骥。
Policy Approximation
这里我们用 \pi(a|s, \theta) 表示参数化的 Policy ,其中 \theta 为需要优化的参数,即
\pi(a|s, \theta) = P[A_t=a|S_t =s, \theta_t=\theta]
于是通过提升/降低某些 P(a|s) 我们就能对 Policy 进行调整,即优化 Policy 成为了优化 \theta 的问题。
对离散 Action,我们一般可以使用 softmax 来计算 \pi(a|s, \theta) ,其中 h(s, a, \theta) 可以看作对此状态的倾向
\pi(a|s, \theta) = \frac{exp(h(s, a, \theta))}{\sum_b exp(h(s, a, \theta))}
Policy Gradient
我们将优化目标 \eta 定义为
\eta(\theta) = v_{\pi_{\theta}}(s_0)
其中 v_{\pi_{\theta}} 表示 \pi_{\theta} 的 Value Function,于是有
\frac{\partial \eta}{\partial \theta} = \frac{\partial \eta}{\partial \pi}\frac{\partial \pi}{\partial \theta}
由于 \eta(\pi) 的解析式一般很难求解,计算其梯度自然也是不太可能的。幸运的是,Sutton 在 "Policy gradient methods for reinforcement learning with function approximation. 2000"给出了更加简易的求解式,并将 \nabla \eta(\theta) 与 q(s,a) 联系了起来,即影响深远的 Policy Gradient Theorem,如下
\begin{align} \nabla \eta(\theta) &= \nabla v_{\pi_{\theta}}(s_0) \\ &= \sum_s \sum_{k=0}^{\infty}{\gamma^k P(s_0 \rightarrow s,k,\pi)} \sum_\alpha \nabla \pi(a|s) q_\pi(s,a)\\ &= \sum_s d_\pi(s) \sum_a \nabla \pi(a|s) q_\pi(s,a) \\ \end{align}
其中, P(s_0 \rightarrow s,k,\pi) 表示当起始状态为 s_0 ,通过 Policy \pi 执行 k 轮后,状态为 s 的概率。 d_\pi(s) 表示此折扣型回报条件下的折扣分布。此式的证明可以参考原文或《reinforcement learning :an introduction》的 Section 13.2,此处不再赘述。
有了 \nabla \eta(\theta) ,我们就能根据梯度下降来更新 \theta (使 \eta 增长最快的方向)。
REINFORCE 算法
Policy Gradient Theorem 虽然简化了 \nabla \eta(\theta) 的计算,但一般 d_\pi(s) 仍然是未知的。观察公式可以看出, d_\pi(s) 其实是加权的概率,若我们将折扣因子提出来后,剩余部分则可以通过采样的方式来近似,即
\begin{align} \nabla \eta(\theta) &= \sum_s d_\pi(s) \sum_a q_\pi(s,a) \nabla_\theta \pi(a|s,\theta) \\ &= E_\pi[\gamma^t \sum_a q_\pi(S_t,a) \nabla_\theta \pi(a|S_t,\theta)] \\ \end{align}
可以看出, \nabla \eta(\theta) 已经可以通过采样来计算。但是这样每次计算梯度都需要采样多个 Action,效率比较低,若我们仅采样一个 Action 用于估计其期望,有
\begin{align} \nabla \eta(\theta) &= E_\pi[\gamma^t \sum_a \pi(a|S_t,\theta) q_\pi(S_t,a) \frac{\nabla_\theta \pi(a|S_t,\theta)}{\pi(a|S_t,\theta)}] \\ &= E_\pi[\gamma^t q_\pi(S_t,A_t) \nabla_\theta log \pi(A_t|S_t,\theta)] \\ &= E_\pi[\gamma^t G_t \nabla_\theta log \pi(a|S_t,\theta)] \\ \end{align}
至此,我们每步仅需要采样一个 Action 即可估算梯度。这就是 Williams 在"Simple statistical gradient-following algorithms for connectionist reinforcement learning. 1992"提出的 REINFORCE 算法,其具体步骤如下
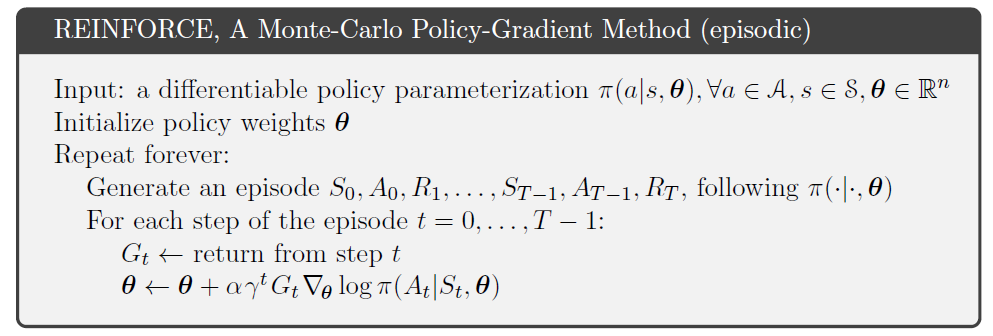
可以看出,REINFORCE 算法是典型的 Monte-Carlo 算法,因此也就拥有 MC 算法的特点:很好的收敛性,但收敛较慢;只能处理有终止 State 的任务,且较高的 Variance。
也有简单的办法减少 REINFORCE 算法的 Variance,即 REINFORCE with Baseline。由于
\sum_a b(s) \nabla_\theta \pi(a|s,\theta) = b(s) \nabla_\theta \sum_a \pi(a|s,\theta) = b(s) \nabla_\theta 1 = 0
其中 b(s) 是一个与 a 无关的变量,于是有
\nabla \eta(\theta) = \sum_s d_\pi(s) \sum_a (q_\pi(s,a)-b(s)) \nabla_\theta \pi(a|s,\theta)
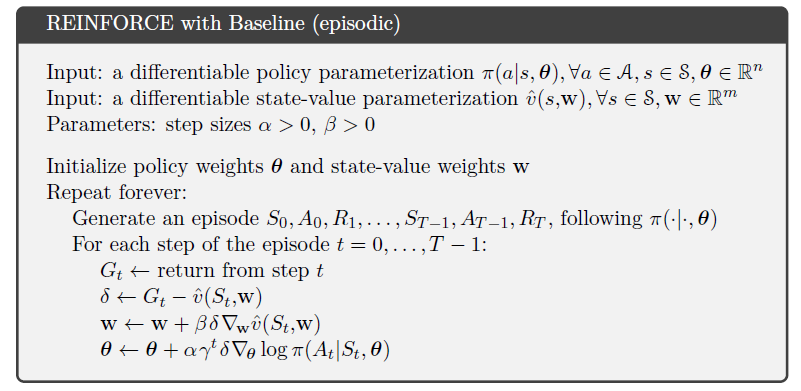
通常,可以将 b(s) 设置为 v(S_t, w) 。然后在优化的过程中,同时更新参数 w,\theta ,实现对 v(s),\pi(s) 的求解。REINFORCE with Baseline 具体的流程如下
Actor Critic
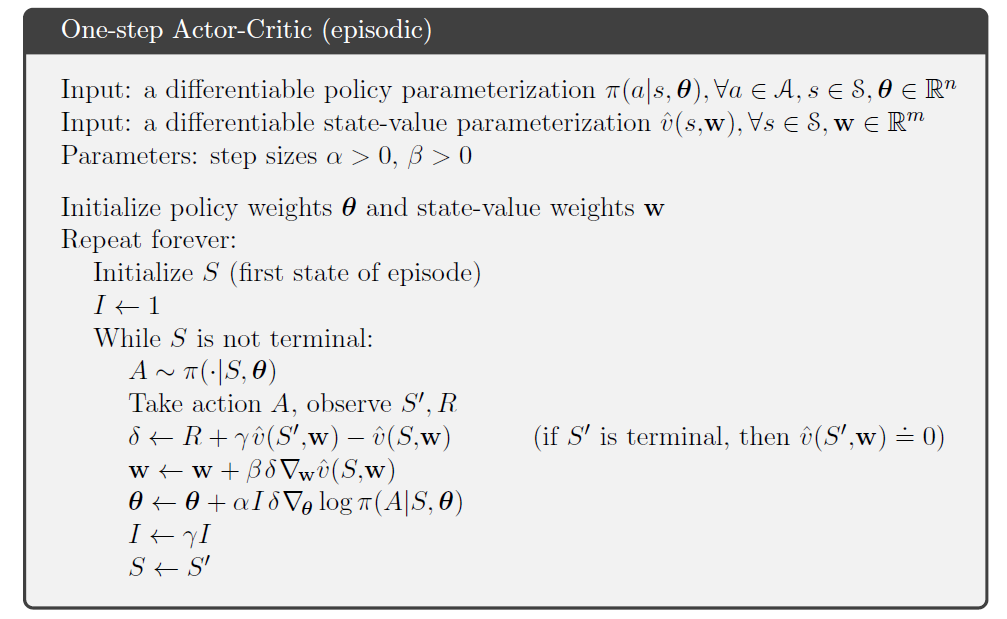
Actor Critic 是一类算法的统称,从概念上跟以前介绍的 GAN 很像,包含两个模块:Actor(执行器)和 Critic(评价器)。其中,Critic 用于评价当前状态,具体来说就是 bootstrap 地估计 Value Function;而 Actor 用于改进当前 Policy,即根据 Value Function 来更新 Policy 参数。凡是有此类性质的算法都属于 Actor Critic 算法。
上面介绍的 REINFORCE 算法虽然也同时学习了 Policy 和 Value Function,但它并不属于 Actor Critic。原因在于,它学习出的 Value Function 只是作为 baseline,而不是用于 bootstrap。
比如,将上述 REINFORCE with Baseline 算法修改为 Actor Critic 形式,可以将 G_t 用 One Step Return 来替代,则有
Deterministic Policy Gradient
上面我们介绍的都是 Stochastic Policy,即采取的 Action 是不确定的,如上面所写
\pi(a|s, \theta) = P[A_t=a|S_t =s, \theta_t=\theta]
对 Stochastic Policy 计算题度时,如上述公式所述
\nabla \eta(\theta) = \sum_s d_\pi(s) \sum_a q_\pi(s,a) \nabla_\theta \pi(a|s,\theta)
即必须同时对 State 空间和 Action 空间进行采样,对于高维 Action 空间任务,代价是很大的。
Deterministic Policy Gradient 由 Silver 在"Deterministic policy gradient algorithms. 2014"中提出。对于 Deterministic Policy,State 与 Action 的映射关系是确定的,写作
a = \mu_\theta(s)
按常理推断,如果 Deterministic Policy 的梯度也存在的话,其计算应该只需要对 State 空间采样即可。这能显著提高 Action 空间较大的任务的优化,如典型的机器人任务。不过为了达到能对 Environment 进行探索的目的,可以借助 Actor Critic 与 Off Policy。
如前文所说,Off Policy 即 Actor 和 Critic 的 Policy 是不一样的,即 \beta(s) \ne \mu(s) 。于是我们可以将优化目标定义为 Target policy 的 Value Function 的积分,并且根据 Behavior policy 进行加权,有
\begin{align} J_\beta(\mu_\theta) &= \int_S \rho^\beta(s)V^\mu(s)ds \\ &= \int_S \rho^\beta(s)Q^\mu(s, \mu_\theta(s))ds \\ \end{align}
根据论文推导,梯度的计算为
\begin{align} \nabla_\theta J_\beta(\mu_\theta) &\approx \int_S \rho^\beta(s) \nabla_\theta \mu_\theta(a|s) Q^\mu(s,a)ds \\ &= E_{s\sim \rho^\beta}[\nabla_\theta \mu_\theta(s) \nabla_a Q^\mu(s,a) |_{a=\mu_\theta(s)}] \\ \end{align}
可以看出,梯度计算已经不需要对 Action 进行采样了。具体的推导比较复杂,这里就不再展开,建议参考原文。
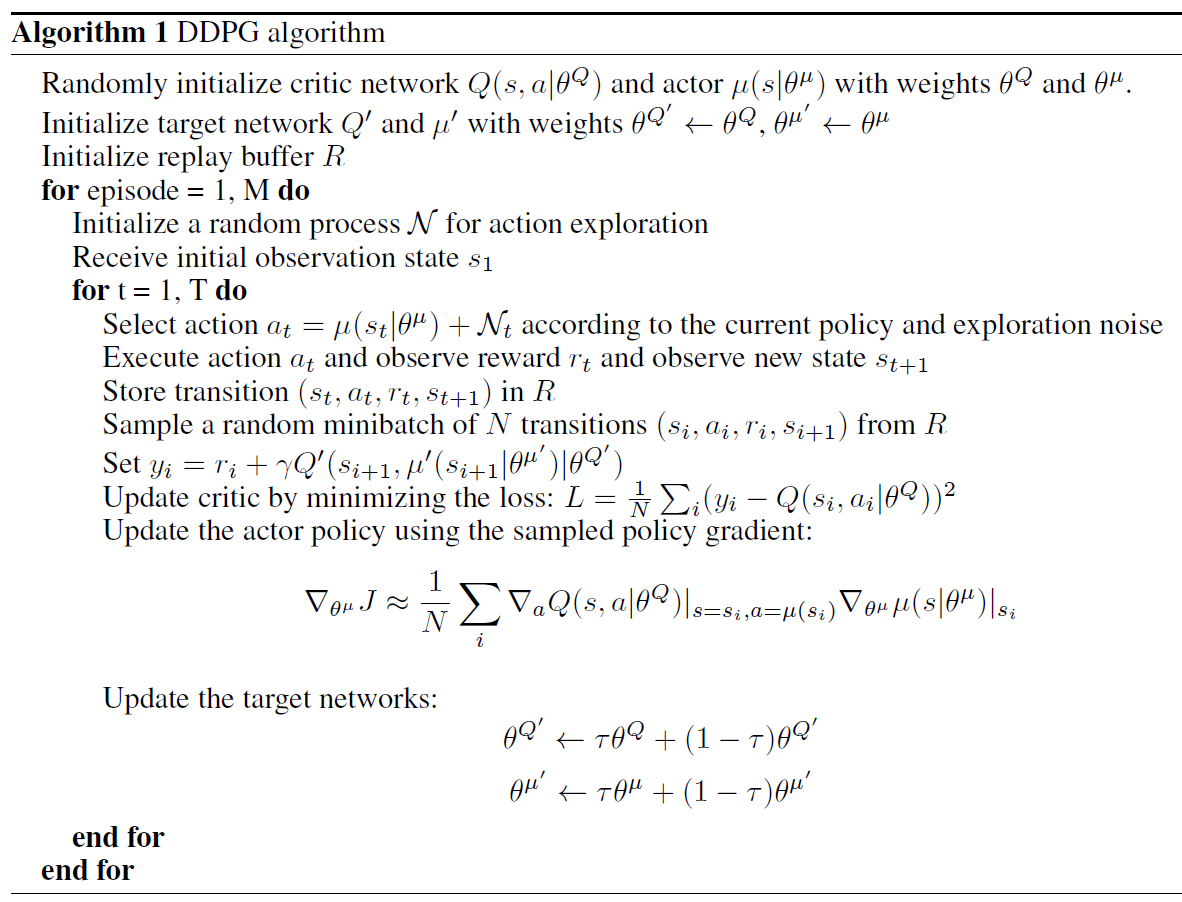
Deep Deterministic Policy Gradient
与 DQN 一样,有学者尝试将 DPG 与 DL 结合,于是有了"Continuous control with deep reinforcement learning. 2015"中的 DDPG。DDPG 与 DPG 的最主要区别就在于利用神经网络来学习 \mu(s) 与 Q(s,a) 。
在 DQN 中对 Q(s,a) 的学习方法概括下来就是:
\begin{align} & \mu(s) = argmax_a Q(s,a) \\ & Q^*(s,a) = r + \gamma Q(s',\mu'(s');\theta^{Q'}) \\ & L(\theta^Q) = E_{s,a,r}[(Q^*(s,a) - Q(s,a;\theta^Q))^2] \\ \end{align}
其中, Q^*(s,a) 为我们期望学习的目标。虽然DQN 本身已经能处理大规模连续空间的问题,但是按照作者的说法,每一步都求解 \mu(s) = argmax_a Q(s,a) 的效率是很低的。如果能直接求解 \mu(s) 那么效率就大大提升了。
于是可结合上文所述的 Policy Gradient 方法,刚好我们在 DPG 中已经有了求解 \mu(s) 的算法,即
\nabla_{\theta^\mu} J \approx E_{s\sim \rho^\beta}[\nabla_{\theta^\mu} \mu(s|\theta^\mu) \nabla_a Q(s,a|\theta^Q) |_{a=\mu(s)}]
接下来,就是将 \mu(s;\theta^\mu) 与 Q(s,a;\theta^Q) 利用神经网络来表示,并利用梯度下降来更新。由于整套方案几乎就是融合了 DQN 和 DPG,具体细节不再赘述,可以参考相关章节。其步骤如下
A3C
A3C(Asynchronous Advantage Actor-Critic) 是 DeepMind 在"Mnih V, Badia A P, Mirza M, et al. Asynchronous Methods for Deep Reinforcement Learning. 2016"中提出的一种 DRL 算法,主要优势在于大大提高了训练的效率。同时A3C也代表着一种新的 Actor Critic 算法训练框架,可以与不同的 RL 算法结合使用,具有很强的扩展性。下面我们详细介绍一下
A3C 中的 Value Function
作者首先定义了Advantage A 如下
A(s,t) = Q(s,a)-V(s)
这里 A 可以理解为采用当前 Action 得到的 Q(s,a) 比平均 Value Function V(s) 要优秀多少,这也是为什么叫做 Advantage。
Q(s,t), A(s,t) 的估计可以通过采样获得,即
\begin{align} & Q(s,t) = r + \gamma V(s') \\ & A(s,t) = Q(s,a)-V(s) = r + \gamma V(s') - V(s) \\ \end{align}
其中, V(s) 需要用网络来学习。
当然,上述 Q(s,t) 是 One Step 的,而 A3C 中作者使用的是 N Step,即
Q(s,t) = r_t + \gamma r_{t+1} + ... + \gamma^{n-1} r_{t+n-1} + \gamma^n V(s')
按照作者的说法,N Step 中单次 Reward r 能直接影响先前 n 个 pairs,可以加速收敛。
A3C 中的 Policy
A3C 中 \pi(a|s) 也需要用网络来学习。在 REINFORCE with Baseline 部分,我们提到过
\nabla \eta(\theta) = \sum_s d_\pi(s) \sum_a (q_\pi(s,a)-b(s)) \nabla_\theta \pi(a|s,\theta)
通常, b(s) 被设置为 Value Function v(s) ,于是公式可以写成
\nabla_\theta \eta = \sum_s d_\pi(s) \sum_a A(s,a) \nabla_\theta \pi(a|s)
A3C 中的 Actor Critic
如上述所说, \pi(a|s),V(s) 都用网络来表示,即
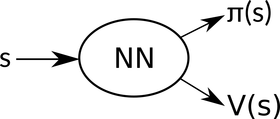
其中,则 \pi 作为 Actor,需要学习出更优秀的 Policy;而 V(s) 为 Critic,需要学习出更准确的 Value Function 对现状进行评价。
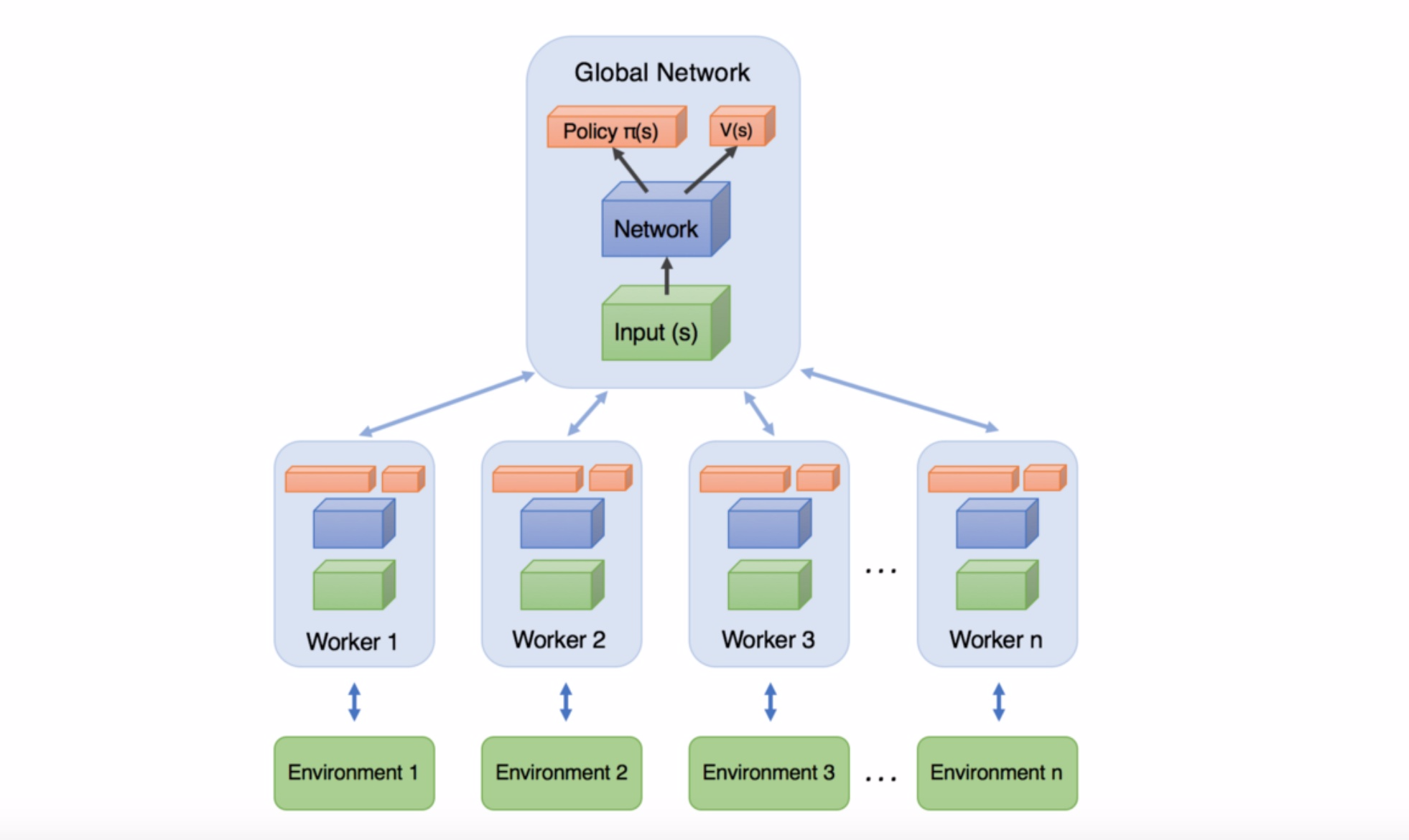
A3C中的 Asynchronous 训练框架
在"当我们在谈论 DRL:从Q-learning到DQN"的 DQN 部分,我们介绍了利用 Experience Replay 来减少训练数据相关性,来提高训练效果的方法。在 A3C 中,作者利用多线程并行(异步)地对环境进行探索,分别产生训练数据。不同线程的数据天然是不相关的,自然也就不再需要 Experience Replay 了。同时,异步探索使得采样速度更快、分布更加均匀,也能提高训练效果。其示意图可以用下图来描述
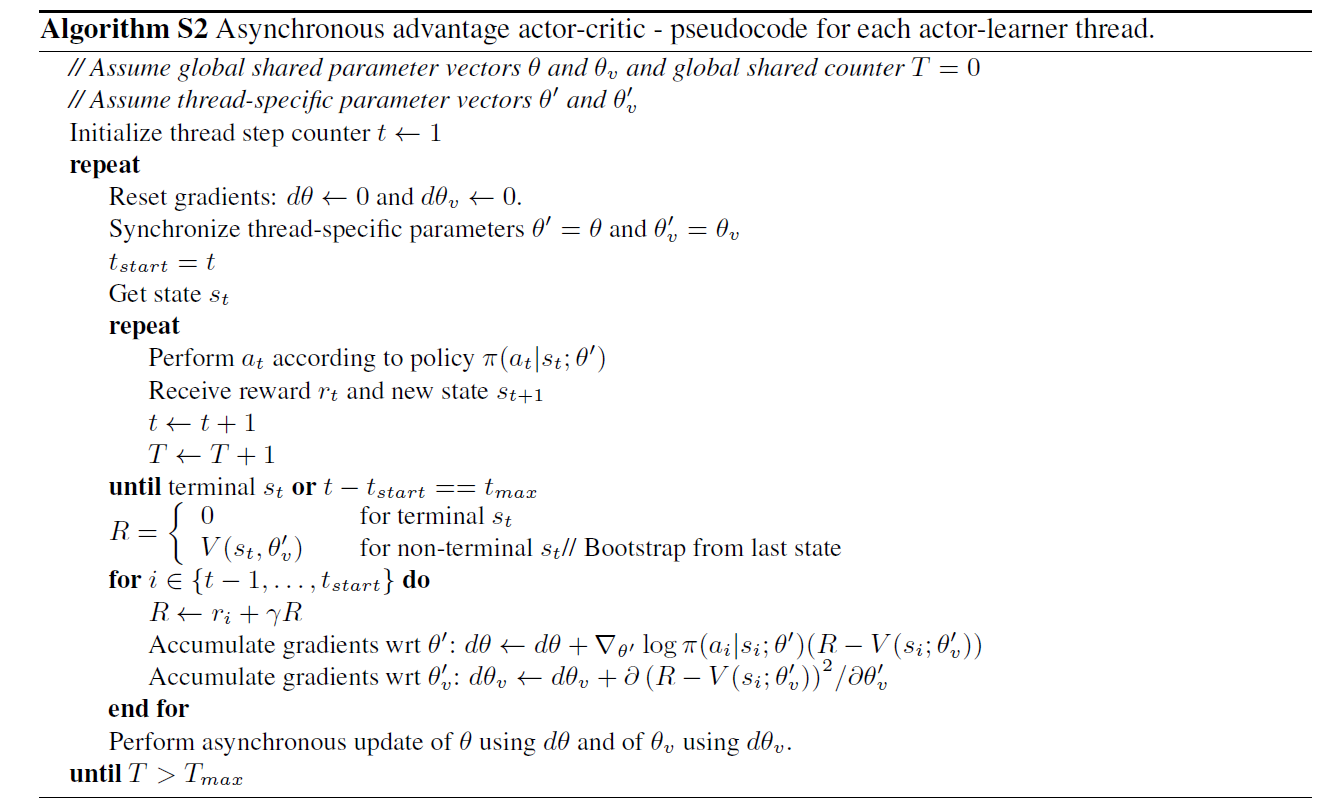
最后,A3C 的具体步骤如下
小结
本文跟随 Policy Based 算法的发展,简单介绍了过程中较为著名的 RL/DRL 算法。可以看出,不论是 PG -> DPG -> DDPG -> A3C,甚至包括上一篇文章介绍的 Q-learning ->DQN, 其实都有着很明确的逻辑链条(更多的是继承,以及每次一小步的突破),才终于缓慢进化到如今的 Alphago、Dota AI、StarCraft AI 等,每每想来总会感慨学术发展的不易。当然,限于水平与时间有限,RL/DRL 部分只能以极短的篇幅简单介绍,大家需要更深入的学习还是得回归论文与书籍。
尾巴
"当我们在谈论 Deep Learning"系列从开始写到现在大半年的时间,从最初的 Backpropagation,到超参数,再到架构如 CNN、RNN 等,再到 Unsupervised Learning,以及最后的 Reinforcement Learning 与 Deep Reinforcement Learning,算是基本完成了本人最初"对 Deep Learning 相关理论知识的简单梳理与介绍"的目标。同时在此,也对过程中提出改进建议与参与阅读的同学表示感谢!
当然,新的系列仍然还是会写下去,只不过内容与形式我还没有确定下来,或许会换换口味哈哈。
本系列其他文章:
专栏总目录(新)

没有评论:
发表评论