
李根 发自 凹非寺 量子位 报道 | 公众号 QbitAI
哪里讲理去?
苹果也是不走运,最不想谈论的无人车项目,最近发生了第一起车祸事故。
但果粉放心,不是苹果的锅。
事情要从美国太平洋时间8月24日说起,当时中国这边已到中元节,下午14:58,苹果无人车正在自家总部附近转悠,万万没想到,就这样被人追尾了。

当是时,苹果为无人驾驶路测而改装的雷克萨斯RX 450h,处于自动驾驶状态(车内有安全员),正伺机从匝道进入高速,时速1.6公里左右——非常小心翼翼了。
但此时,从后面来的2016款日产Leaf,以25迈的时速,从后撞上了苹果无人车。
结果是苹果的雷克萨斯车尾受损,日产Leaf前部遭创,但双方都没有人受伤。
事故处理完成后,苹果也按规定向加州交管局主动提交了报告。
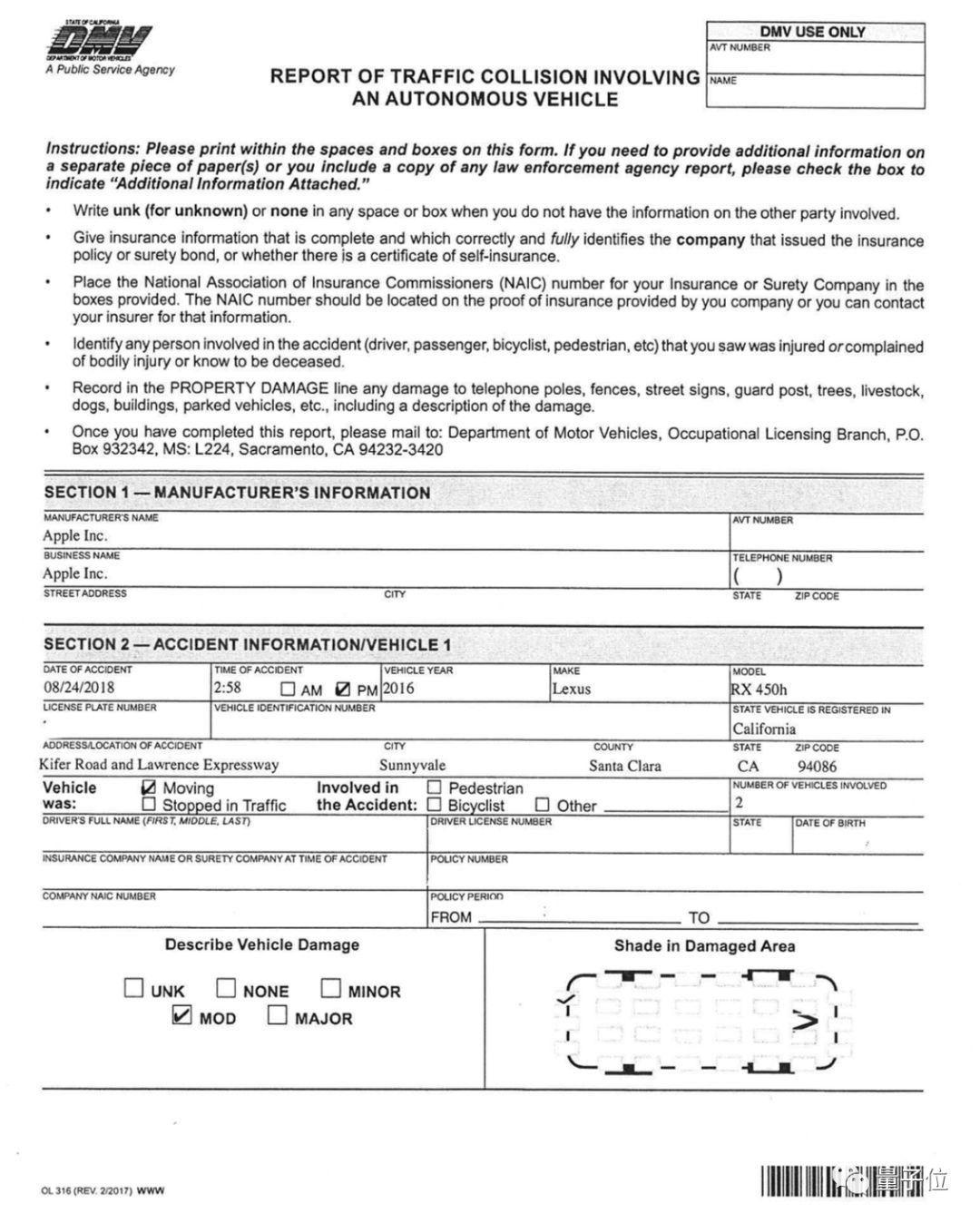
报告中详细说明了事故时间、地点、撞车部位,以及当时的各种外部环境等。
不过对于事故责任问题,苹果没有提及,后续也没有对外发表评论。
根据整个过程来看,谁是谁非,应该并不难断。
也不知道那位追尾的日产车主,知道自己撞上苹果无人车后,是一种怎样的心情?
苹果又被diss了一番
但苹果这一边肯定不会心情愉快。
由于这"第一起事故",苹果无人车又被各大外媒批判了一番。
针对的也不是苹果无人车事故本身,而是又双叒叕提到了苹果自动驾驶进展缓慢的问题。
眼看还有2周就要迎来新iPhone发布,你说这不是破坏祥和美好的气氛吗?
路透在报道说中,苹果上下都很少谈论自动驾驶计划,而且起步还很晚,Google等搞了好几年,苹果才开始打算测试,要努力啊。
The Verge则直接提到了Titan项目的困境,说这个传闻中的无人车野望计划,正在离初心愿景越来越远,当初说好要软硬件一起整,现在都没啥正面消息出来。
甚至连一向对苹果理解万岁的9to5mac,谈到苹果无人车时也用了"令人困惑"这样的说法,认为苹果自动驾驶在过去一年里的进展,可能真到了实锤太少而无话可说的地步。
总之,不管买不买,也不管苹果以后如何来割肾,现在大家对苹果无人车的进展,都不太满意。
毕竟你可是苹果,你可是always重新定义一切的公司,你还是首家冲破万亿美元市值的科技巨头。
无人车竞速时代,你怎么能掉队呢?

苹果新进展
苹果也并非全无进展。
就是2周前,加州车管局还确认过,目前苹果无人驾驶路测车队,规模已是55车、83驾驶员。
这样规格的车队,不止加州,就是放眼全世界,恐怕也就Waymo和Uber能够相提并论了。
而且今年7月,由于把涉嫌盗取商业机密的华人员工告上法庭,苹果还被动披露了更多新进展。
比如以访问权限来算,能访问无人车核心机密的有2700人,能登入Titan——苹果无人车项目代号——则多达5000人。
虽然这个数目在13.5万的苹果全职员工中,不算多,但作为一个看起来颇为初创的项目,投入确实不菲了。
类比来说,就算是以中国无人车"国家队"自居的百度,Apollo道路之前,也才300人左右的研发规模。

另外,苹果无人车"盘子"也很大。
还是在诉告华人工程师的案子中,苹果提到了自动驾驶实验室,并且谈到了电路板、专用芯片等方面的事项。
一直以来,对于苹果如何开展自动驾驶业务,外界猜测并不少。
软件系统自不必言,这是苹果的强项所在,但涉及芯片、电路板等硬件,却也着实是头一回曝光。
如此看来,苹果未来很可能倾向于打造自研软硬件套装,然后卖给车厂。
以爆料苹果知名的分析师Ming-Chi Kuo,近期也评论过Apple Car。
他认为汽车行业当前出现的变革,明显是软件定义硬件、新技术重新定义旧行业,跟10年前智能手机面临的机遇大同小异。
而对于苹果而言,用AI、AR重新定义汽车,有基础优势。并且苹果手握重金,通过车还能进入汽车金融等领域,对未来业务增长非常有利。
最后,苹果还能把当前的消费电子领域的成功,延续到汽车行业,还能进行主导性整合,软件+硬件+服务,这条路苹果太熟门熟路了。
但上述分析归分析,具体苹果汽车真正推出,Ming-Chi Kuo预测还需要5-7年的时间,即2023年至2025年。
这算久吗?
苹果无人车前世今生
对果粉而言,肯定不算。
毕竟4年都过来了,又何惧再等5-7年?
苹果无人车项目,最早可追溯至2014年,内部代号Project Titan。
当时该项目一建立,就吸引了多名苹果资深员工加入,还招募了一些造车方面的工程师,"造车"这个方向几乎不言自明。
起初,Project Titan的工程师们聚焦在各种造车的细节上:怎么搞一个静音车门,没有方向盘和油门的情况内饰怎么设计,怎么把AR/VR设备放到车里,甚至他们还准备重新设计一款更美观的激光雷达、怎么应用球形轮胎……
2015年,苹果还买下了三个与之相关的顶级域名,包括:apple.car,apple.cars和apple.auto。
不过迄今为止都没有启用。
高峰时期,苹果在Project Titan项目上投入的员工,据说有上千人的规模。大名鼎鼎的"强纳肾"Jonathan Ive也参与了苹果车的设计开发。
不过这个项目在2016年遭遇了严重的危机,不少项目的核心人物纷纷退出,团队规模也大幅缩减。外界用泰坦(Titan)陨落来形容这一变故。
直到去年,苹果无人车项目才缓过一口气来。
去年4月,苹果获得了加州的无人车路测许可。当时获批的三辆测试无人车全部都是2015款雷克萨斯RX450h。此前,苹果购入了不少雷克萨斯进行改装测试。
随后,苹果无人车使用的系统Apple Automated System也被曝光。(今年苹果无人车的一些专利也对外公开,包括手势控制变道等)

紧接着2017年6月,苹果CEO库克首次详细谈及无人车战略,他透露苹果正在专注于自动驾驶技术的研发。
库克说:"我们认为这是所有AI项目之母"。更早之前的4月,苹果无人车获得了加州路测许可。
这让人看到新希望,同时苹果也被曝光改弦更张,希望更快推出无人车产品——让一部分人先看到未来。
所以就在今年5年,苹果无人车有了实锤进展,与大众汽车达成合作协议,共同研发自动驾驶的无人车。

而且发布时间,可能会在2019年。
但别高兴太早,因为这更像是一个"面子工程"或"展示项目",因为从目前信息来看,改装称无人驾驶的面包车,会主要用于园区内通勤,接送员工什么的,跟真正对外还距离很远。
总之,有胜于无吧,还要啥自行车呢?
首次车祸事故简史
最后,既然这是苹果无人车的第一次事故,不妨也一起回顾下其他无人车公司的第一次。
先说目前全球"遥遥领先"的Waymo。
2016年还以Google无人车之名行事,在当年2月14日,也是Google总部附近,也是一辆雷克萨斯RX450h,也是在低速行进中被人类司机追尾,跟今日苹果第一次,颇为相似。
唯一不同的是,当时追尾Google无人车的车辆,是一辆更结实庞大的公交车。

当然,Google无人车搞得早,也遭遇过更严重的事故。
最严重的一次是2016年8月,当时正处于自动驾驶状态的无人车,在进入十字路口时被一辆闯红灯的商务货车撞了,当时安全气囊都已全部弹出,右侧车门严重下凹,但所幸无人员伤亡。
不过那一次事件里,Google也趁机向全世界强调了无人车的安全性,说无人车就不会有闯红灯的问题,Google无人车正是为减少人类司机不当操作而生,自动驾驶会让交通更安全。
然而行业初期,独善其身可不够,猪队友一个接一个。
一个猪队友是特斯拉。
在2016年5月,处于"自动驾驶"状态的特斯拉Model S,在十字路口撞上一辆白色卡车,由于没有刹车操作,连挡风玻璃都撞进了卡车底部,特斯拉车主当场死亡。
后来报告显示,核心原因是特斯拉Model S在强烈日光下,没能"看清"白色车身的卡车。

虽然这起致死车祸,没直接影响特斯拉销售,但由于一直把高级辅助驾驶当"自动驾驶"宣传,特斯拉的车祸让自动驾驶又被热议了一把。
直到后来特斯拉"自动驾驶"车祸曝光多了,吃瓜群众才开始厘清,特斯拉的自动驾驶比较特殊。
然而另一大猪队友Uber,就真给行业拖后腿了。
Uber无人车第一次车祸,发生在2017年3月,当时在Uber测试的亚利桑那州,下午18点,被违规行驶的人类驾驶车辆撞得侧翻。
其时Uber无人车处于自动驾驶状态,驾驶座也有安全员,但来不及躲闪,所幸无人员伤亡,后来警方也判定:Uber无责。

但迄今最严重的一次,完全就是Uber无人车的责任了。
今年3月18日,依然还是亚利桑那州,Uber无人车没有感知到横穿马路的行人,没有减速,安全员也没任何反应——后来调查是正在玩手机,最后导致被撞人死亡。
这是全球第一起无人车撞人致死事故,让整个行业都陷入尴尬。
而后来调查显示,这是一起完全可以避免的事故,但Uber在安全性方面的失职、技术上的差劲,最后让整个行业一起埋单。

当然,目前为止,还没有一起中国无人车玩家的"车祸事故"。
一方面是在加州路测的玩家普遍谨慎、安全意识很高,而且车辆也不算多,即便被撞,概率也没有waymo和苹果这样高。
另一方面是国内刚刚出台相关路测法规和机制,之前发生的事故可能更倾向于隐秘不闻。
但可以肯定的是,中国无人车玩家并非没有车祸事故。
在西二旗往北的路段,都发生过不少无人车事故,而且据传还有一些"职业"碰瓷的人类司机。
他们乐于追尾无人车,然后给出"给钱私了"或"去交通队"的选项。
一度无奈黑跑的无人车玩家,哪敢去交通队?
所以就有AI带路党吐槽:你们人类才是无人车发展的最大阻碍呀。
嗯,也不是没有道理~
— 完 —
欢迎大家关注我们的专栏:量子位 - 知乎专栏
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复"招聘"两个字。
量子位 QbitAI· 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态









