李根 发自 凹非寺 量子位 报道 | 公众号 QbitAI
这就令人看不明白了。
昨天(7月30日),搜狗交出了截至2018年6月30日的第二财季成绩单,总营收3.014亿美元,比去年同期增长43%,净利润3820万美元,比去年同期增长58%。

△ 搜狗营收示意
这是一个什么概念呢?
搜狗自创立以来,就没有单季度赚过如此多的钱,而且历史上首次营收迈入3亿美元大关——开始奔"4"。
结果上来说,该是一个满心欢喜的成绩单才对。
然而大跌眼镜的是,财报发布后,搜狗股价不涨反跌,最高跌幅超过10%,最后收盘于9.55美元,整体跌幅达7.55%
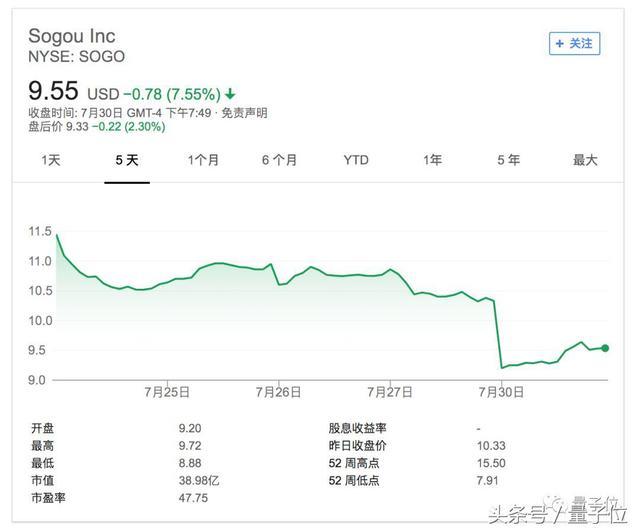
△ 搜狗股价走势
这就好比考了个历史好成绩回家,却还挨了一顿胖揍。
资本市场波云诡谲,玄机深深深几许。
搜狐拖后腿
但搜狗这顿打,也并非全无原因。
首先,受自己亲爹搜狐不给力拖累。
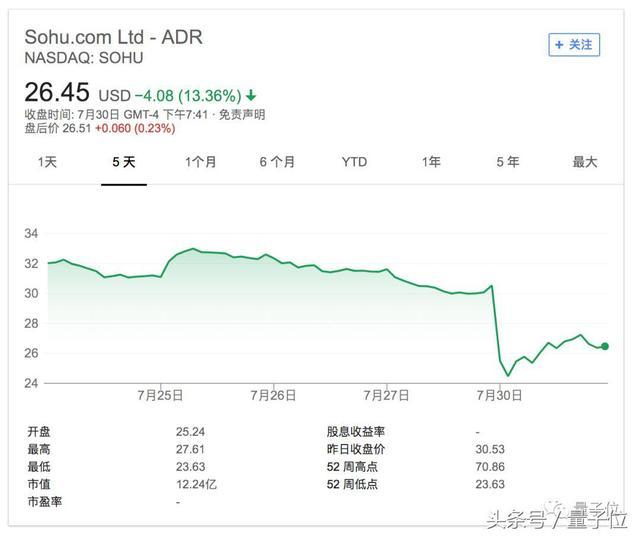
搜狐昨天也发布了上一季度财报,总营收4.86亿美元,相比去年同期增长5%,净利润亏损4900万美元,比去年同期相比有所收窄,但亏损幅度之大,一个搜狗净赚的钱,都不够填补了。
更何况搜狐这份财报,比华尔街分析师们预计的还要差。
原本根据雅虎财经汇总的数据,华尔街4位分析师平均预计,搜狐第二季度总营收将达5.022亿美元。但财报显示,搜狐第二季度总营收为4.86亿美元,不及分析师预期。
所以搜狐财报一发,股价盘中一度大跌逾20%,最后收盘于26.45美元,整体跌幅达13.364%。
作为中国互联网的老大哥,遭遇这样的境况,也难免令人一声叹息。
好在有落有起,张朝阳在财报媒体会上也透露了,这只是搜狐复兴的第一步,也在进行视频等核心业务方面的转型探索,并且明年就有望盈利了。
另外,搜狗也不是全无自身原因,同样成绩不及华尔街分析师预期。
根据雅虎财经汇总的数据,此前5位分析师平均预计,搜狗第二季度总营收将达3.0455亿美元。
但最终财报显示,搜狗第二季度总营收为3.014亿美元,不及分析师预期。
加之最近大盘整体情况也不好,道琼斯指数昨天下跌了0.57%。
所以搜狗算是好业绩没遇上好天气。
流量和广告监管
但是否能短期出晴,要看华尔街资本家们认不认可搜狗短期的目标了。
依然在财报发布后,搜狗CEO王小川和CFO周毅,回答了分析师们集中关切的问题。
其实最核心的就3个。
一是广告监管事件。就在前段时间,由于抖音在搜狗搜索引擎上投放侮辱英烈的推广广告,抖音和搜狗都遭遇监管,被中止开展广告业务,目前也没有重启风声。
于是营收上不可能不受影响。
但搜狗CFO周毅的说法是,抖音事件的影响确实会体现在第三季度,但对财务的影响是一次性的,搜狗已经采取了补救措施,营收增长在第四季度就会恢复到正常水平。
另外,在该事件后,搜狗也建立了团队,并且在广告投放监管机制上使用了AI,相信也能进一步提升运营水平。
第二个分析师关键词是流量。而且最为关切的是,搜狗目前的流量中,来自腾讯和OEM(手机预装)等渠道的流量。
周毅的回答是,在第二季度流量构成中,有25%属于原生性流量,37%来自腾讯,还有38%来自OEM渠道。
并且得益于搜狗采取的一系列举措,预计到今年年底原生性流量的占比将从现在的25%上升至27%-28%,来自腾讯的流量贡献将保持不变。
加之竞争加剧,来自OEM渠道的流量占比将下滑1%-2%,也就是说,到今年年底将从38%下降至37%-36%。
实际上,从搜狗CFO回答中,侧面也能看出OEM渠道流量贡献力的进一步降低,性价比也将进一步减弱。

最后一个关心的方面是输入法和智能硬件。
关于搜狗输入法,核心问题是如何商业化以及何时商业化。
按照王小川的回答,输入法的变现的核心思路是与搜索结合,然后运用AI等技术,探索到用户的搜索意图,引导用户产生更直接的搜索行为。
具体产品方面,搜狗CEO透露,新版产品的测试已在本季度上线,预计会在第四季度对收入产生比较明显的影响。
至于智能硬件方面,王小川表示年内还会推4款产品出来,并且到明年能产生百万级的销量。

此前,搜狗已经对外推出了主打翻译的搜狗旅行翻译宝,以及主打速记的搜狗速记翻译笔。
王小川认为,互联网起家的搜狗"大举"进军硬件,核心还是将搜狗的AI和语音搜索整合其中,并且带来差异化的核心竞争力。
实际上,这一系列的硬件,还承载着王小川最新的人生目标。
王·玄奘·小川
可能你也奇怪了,上市以后的搜狗,为啥在缺乏"基因"的硬件领域频频下注?
在近期,量子位围绕该话题也跟王小川有过专门对话,或许能解答你部分疑问。
首先,之所以亲自下水做硬件,是因为"舍我其谁"了。
搜狗以软件互联网起家,拿手擅长的也是互联网产品,但无论是翻译,还是速记,目前在AI加持下,都已经有了质的飞跃,都可以更便捷地进入寻常百姓家。
然而目前最核心的移动智能硬件——手机,在硬件如麦克风阵列,在计算单元方面,都还无法满足直接搭载相同效果软件的诉求。
于是为了更好打磨软件,也为了更好从硬件反馈,搜狗开始软硬件一体化尝试,而且是软件定义硬件的方式向前发展,如果找硬件合作方,从设计到迭代,可能都不会由自己完全掌控顺遂。
其次,硬件担纲的是搜狗AI的新品牌。
王小川说,通过硬件产品,让用户能更直接了解搜狗目前的AI能力和AI应用,利于打响翻译、语音识别等方面的品牌。
实际上,搜狗目前已经在输入法、搜索和其他App产品中上线了上述AI能力,但还没有"明显"对外推出。
王小川的想法是,找到了这些AI技术的应用场景,再通过硬件,让用户更了解软件进展,等到手机等交互终端也ready的时候,就能直接"上车",这是一个品牌提前卡位的举措。
更直接来说,翻译和语音识别等,会成为搜狗在搜索、输入法和浏览器之后的新招牌。
不能小觑的是,翻译和语音识别可能也会是搜索格局变化的新变量。
在本次财报发布中,搜狗再次强调了自己在中国搜索市场的第二名地位。移动市场份额占比17.8%。
而且可以肯定的是,这与搜狗在差异化搜索方面的思路密切相关,目前搜狗享有微信公众号和知乎等方面的差异化内容,还在法律和医疗等"新兴"市场中开拓,力图在百度战斗力薄弱的地方进一步抢份额。
于是再借助翻译,用户则可以或许更多非中文领域的内容和搜索结果,亦是差异化搜索的补充。

最后,竞争和搜狗发展之外,大力搞翻译,还承载了王小川的个人新追求。
王小川说,AI变革让翻译变得更简单易用,如果能把翻译解决好,重要性不输于电的发明。
因为会推动人类文明的交流和进步。
在国外,阿拉伯帝国在8世纪到10世纪有过百年翻译运动,国家自上而下主导了古希腊罗马经典的翻译,促成了阿拉伯世界后续500多年的黄金发展期。
而在中国历史上,每一波翻译热潮,都带来了社会文明的进步。
最早可以从唐僧——玄奘说起,他去印度求经, 17年后回国带回佛经657部,还主持了更大规模的译场,用19年时间译经75部1335卷。此外,他还把老子著作的一部分译成梵语。不仅改变了中国文明的后续进程,还推动了两种文化交融交汇。
其后,明末清初又掀起了一次科技翻译的高潮,来华传教士与中国的知识份子共有译著400多种,其中关于科技的130种左右。这些译著使国人了解到西学的一些先进成果,并在社会上产生了一定的影响。为后来中国的工业文明奠定了基础,《几何原本》等就是在那时来到中国的。
第三波是鸦片战争后至"五四运动"前,大量文学作品的翻译,成为中国思想解放的先导,其中后来影响最深远的,莫过于《共产党宣言》。
第四波则是改革开放以来,社科、科技、军事、外交、贸易、法律、文教、卫生等领域都有经典译作出现,但单凭人力的努力,已经很难满足国人更多的诉求了。
于是现在,王小川认为是时候了。
如果通过AI、运用技术,可以实现生产力的根本提升,那"舍我其谁"?
这位以清华学霸知名的创业者说,技术的情怀在于让世界更好,如今有这样的机遇摆在面前,而且有落地应用的场景,可以打造一座融合全球文明的"通天塔",何乐而不为?
王小川也反问:我们中国人在学习英语上花的时间还不够多吗?完全可以做更多高效有意义的事情。
所以王小川愿意把第五次翻译热潮的使命揽在自己肩上,但不靠他一人一力,而是AI。
没错,这是一个AI时代的王·玄奘·小川。
— 完 —
欢迎大家关注我们的专栏:量子位 - 知乎专栏
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复"招聘"两个字。
量子位 QbitAI· 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态