
安妮 夏乙 编译整理量子位 出品 | 公众号 QbitAI
波士顿动力那些踹不倒的机器狗、脚踩风火轮的机器人可谓是颠倒众生,迷死一片网友。
今天,瑞士传来最新消息,那里的科学家们在教机器狗学轮滑。

来我们一起看下。
脚底抹油的轮滑机器狗
首先机器狗身体微倾,然后右脚向后滑,推动整个身体前进,接着身体再向另一侧倾斜,左脚向后滑。持续反复,向前滑行。
这只机器狗,简直是按照人类的动作在滑行嘛!
相比之下,波士顿动力那只Handle所用的方式,虽说性能更强更炫酷,但远没这么"仿生",也没能给机器狗保留四条分开的腿,在不平整地面上的机动性就要打些折扣。
轮滑机器狗从正面看是这样的。即便穿过不同材质的表面,也没有任何影响。
机器狗还能注意到下坡,并直接享受这个过程,停止蹬腿滑行。在下坡的过程中,感觉是整个狗都要飞翔起来~
好,滑得好。但怎么转向呢?目前这个机器狗的前腿并不能支持常见的滑动转向,团队给出的解决方案也很有意思:原地踏步转向……
具体来说,是这样的:

这个会轮滑的机器狗,什么来历?其实这个机器狗就是苏黎世联邦理工学院ETH Zurich团队此前已经开发出来的ANYmal,只不过这次get了轮滑新技能。
作为一个四足机器人,ANYmal能多种不同的地形中自主移动和执行任务,包括工业场景下室内和室外的检查,自然或者危险地区的搜索和救援任务,甚至在娱乐节目中充当表演嘉宾等等。
ANYmal提供了IP67防护等级(也就是防尘防水,现在手机用户也应该常听这个概念了);可由单人安全操作;所有关节都能360°旋转;移动速度可达1米/秒;自身电源能支持工作2-4小时;依靠激光传感器和摄像头导航。
总之,可以跑步、舞蹈、攀爬、负重携带、旋转、跳跃(但不能闭着眼)。

ANYmal的核心技术包括两个个方面。

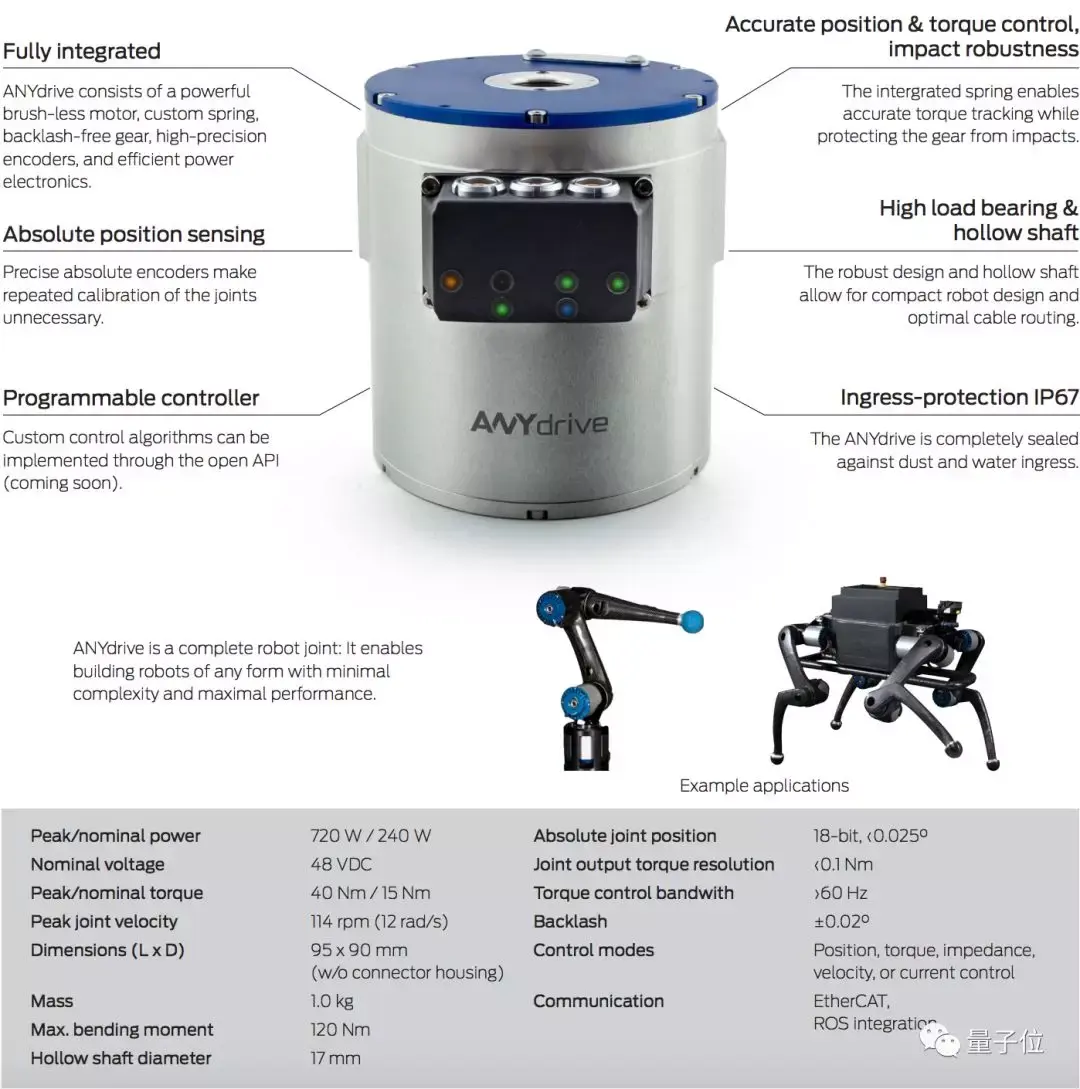
从右边开始说,那是一个高度集成的模块化机器人关节执行器ANYdrive,所有的电机、齿轮、钛弹簧、各种电子元件都集成在一个IP67级防护的密闭单元中。
使用这个关节,无需额外的轴承、编码器或者电力电子装置就能构建任何一种运动力学结构,例如机器人的手臂、机器人的腿等。
ANYdrive的峰值功率和标称功率分别是720W和240W。更多参数可以看下面这张图。
然后说左边,这是一个被称为机器人大脑的ANYbalance,一种平衡控制软件,即便在崎岖地形中也能从容应对,提高四足机器狗的稳定性和安全性。
ANYmal用了哪些软件?
官方列出了一部分,还提供了地址,量子位搬运如下:
Elevation Mapping

用于粗糙地形导航的高度图测绘ROS包,为机器狗提供高程图,以便控制姿态。地址:
ethz-asl/elevation_mapping
Grid Map
这是一个配备ROS接口的C++库,用于管理具有多个数据层的网格地图,可以存储高程、方差、颜色、摩擦系数、立足点质量、表面法线、可穿越性等数据。地址:
ethz-asl/grid_map
LSE库
这个库为有腿系统提供可观测性约束扩展卡尔曼滤波器。地址:http://ift.tt/2Fa281I
Free Gait
自由步态是一个软件框架,用于有腿机器人的多功能控制。地址:
leggedrobotics/free_gait

Kindr
为机器人提供运动学和动力学的C++库,实现各种旋转的参数化。地址:
ethz-asl/kindr
Kindr ROS
ROS包装成Kindr。地址:
ethz-asl/kindr_ros
Traversability Estimation
可穿越性估计,为可穿越的地形提供可遍历的映射。地址:
ethz-asl/traversability_estimation
不过……
那个……其实ANYmal还没学会急刹车。
所以,当它飞一般的从高处冲下来之后,结局是这样的……
undefined_腾讯视频机器人界的"冬奥会"
就算没有轮子,机器人也一样可以"滑"。比如说,滑雪。
前不久,韩国出现了不少会滑雪的机器人。我们看看一段来自"全球首届机器人滑雪比赛"的现场视频:
undefined_腾讯视频比赛现场的情况看起来有点"惨烈"。
不断有机器人以各种姿势摔倒在地,之后被人扶起。不断有机器人被"吊起"再次推向起点,有些机器人需要让主人帮它"穿鞋"……
不过,从视频中看来,这些机器人有一点要比瑞士的轮滑狗厉害:在滑动过程中,它们能够转弯,避开路上的障碍,不用停下来"原地踏步"。
比赛规则
这场比赛由韩国国家商贸部和机器人产业发展研究所联合举办。比赛中,8个参赛机器人需要绕开障碍物,到达终点。

比赛规则相当复杂——
- 参赛者必须是"人形"机器人,并且至少包含15个机械自由度。
- 不欢迎"侏儒"机器人参赛。如果测量机器人从脚底到肩膀的距离还没到50厘米,不好意思,还是让它回家先长长个吧。
- 机器人需要使用滑雪杖和滑雪板,并且姿势一定要标准。当机器人的肘部弯曲站立时,雪杖必须接触地面。
- 赛场滑雪坡道长80米、宽20米,每支竞赛团队有3分钟的时间避开红色和蓝色的障碍物完成比赛。
- 机器人每绕过一个障碍物,就得到一分。比分相同时用时最短的机器人获胜,如果时间也相同,那么……身材更高挑的机器人获胜!
值得注意的是,所有机器人都是全自动的。此外,还有一个专门的遥控比赛可选,但研究人员好像对那个并不感兴趣。
冠军Taekwon V
经过一系列跌跌撞撞的角逐,最终,参赛宣言为"个子小但强壮"的Taekwon V赢得了比赛。
这个小个子Taekwon何许人也?我们调出这位参赛队员的资料看看。

小型机器人:Taekwon V身高:75厘米体重:12kg特征&技能:- 是一个刚性机器人- 身体构成复杂,具有21个关节- 对人体协调运动有独到的见解- 能够像人一样走路- 造价低为你省钱
Taekwon V来自仁川的机器人制造商Minirobot,在18秒内越过5扇障碍门,以4秒明显优势领先于来自韩国机器人与融合研究所(KIRO)的机器人SKIRO。
无视频无真相,请欣赏Taekwon V的英姿。
undefined_腾讯视频从起点出发后,Taekwon V被障碍物绊倒了几次,但……即使被绊倒姿势也依然帅气。之后,Taekwon V仿佛开了挂,正滑、转向、倒滑,然后稳稳停在终点。
技术支持
这些穿着人类滑雪服的人形机器人,究竟是怎么滑雪的?
这场比赛中的大部分机器人,都离不开视觉感知和运动动作控制技术的结合。
上面的动图展示了本次自动滑雪比赛冠军Taekwon V的视角,从中能看出这款机器人具备的视觉能力。它可以比较顺利地认出赛场上设置的障碍物。

对于赛场上穿行的人类,它偶尔能够检测出来,大多数时候都视而不见。
据《韩国先驱报》介绍,这些机器人上装备了雷达和视觉传感器,用来确定它们自己的位置,识别周围那些红色蓝色旗杆的位置。
量子位在Taekwon V所属公司MiniRobot官网的各种产品中,没能找到这位身高75厘米体重12公斤的选手,似乎暂时无法对它的智力水平做更详细的介绍。
不过,我们可以看看这家公司的一款小型人工智能机器人
这款小机器人没有雷达,但是配置了用于图像处理用的摄像头。官方介绍中说,它可以认出10种颜色,包括色块的面积和中心坐标。
从滑雪选手Taekwon V的表现来看,它很可能也是靠颜色来识别障碍物的。这种方法可以说简单易行,但对于临时出现在场上的人类等障碍物,就不太容易认出来了。
另外,Minirobot公司的Sam Kim对《韩国先驱报》透露,外部环境的微小变化都会对机器人的表现有影响。"它们不是人类,红色的深浅有变化,机器人有时就会认不出来。所以在比赛中,阳光的变化就可能导致它们找不到旗杆认不清路。"
认出障碍物之后,下一步任务就是避开它们。
运用这些传感器获取的信息,机器人内置的程序会指导它们做出正确的运动动作,比如说通过操纵腿部的动作左右转弯,躲过那些障碍物。
在顺坡向下滑的过程中,这些机器人面临的最大挑战是反应速度要快。它们需要快速处理接收到的视觉数据,并足够快速地调整自身动作,才能及时转弯。毕竟不是平地,滑着滑着像轮滑狗那样停下来原地踏步显然不太现实。
当然,减速还是可以的。腿部的动作还能帮这些机器人实现另一项轮滑狗缺失的技能:减速。
赛场"八公子"
其实,其他七名参赛其实也挺帅的,满满都是荷尔蒙科技感的味道。

好像每个机器人都必须得穿一件小外套,这让滑雪场面看起来异常可爱。现在它们只需要一些润滑油恢复下身体又能活蹦乱跳了。
— 完 —
欢迎大家关注我们的专栏:量子位 - 知乎专栏
诚挚招聘
量子位正在招募编辑/记者,工作地点在北京中关村。期待有才气、有热情的同学加入我们!相关细节,请在量子位公众号(QbitAI)对话界面,回复"招聘"两个字。
量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技术和产品新动态






